 Major
Major Leagues
The Major Leagues include both RoboCup Major Leagues and RCAP Major Leagues. Due to venue constraints, only a selection of these major leagues will be hosted at RoboCup Asia-Pacific (RCAP) 2025.
RoboCupSoccer Humanoid League
In the RoboCupSoccer Humanoid League, autonomous robots with a human-like body plan and human-like senses play soccer against each other. Unlike humanoid robots outside the Humanoid League the task of perception and world modeling is not simplified by using non-human like range sensors. In addition to soccer competitions technical challenges take place. Dynamic walking, running, and kicking the ball while maintaining balance, visual perception of the ball, other players, and the field, self-localization, and team play are among the many research issues investigated in the Humanoid League.
VIEW MORE
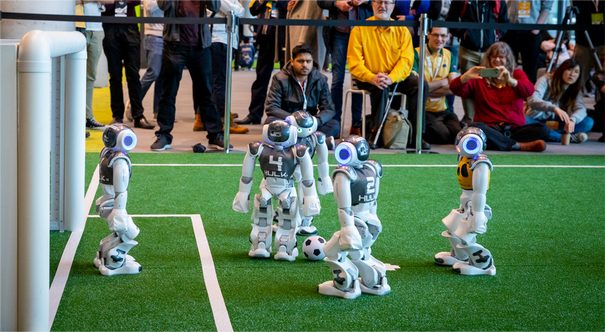
RoboCupSoccer Standard Platform League (SPL)
The RoboCup Standard Platform League is a soccer league where all teams participate using an identical robot platform, currently the NAO humanoid robot manufactured by Aldebaran. Research in this league focuses on algorithmic development for fully autonomous robots. In the Humanoid League, autonomous robots with a human-like body plan and human-like senses play soccer against each other. Unlike humanoid robots outside the Humanoid League the task of perception and world modeling is not simplified by using non-human like range sensors. In addition to soccer competitions technical challenges take place. Dynamic walking, running, and kicking the ball while maintaining balance, visual perception of the ball, other players, and the field, self-localization, and team play are among the many research issues investigated in the Humanoid League. Several of the best autonomous humanoid robots in the world compete in the RoboCup Humanoid League.
VIEW MORE
RoboCupRescue – Robot
The goal of the Urban Search and Rescue (USAR) robot competitions is to increase awareness of the challenges involved in search and rescue applications, provide objective evaluation of robotic implementations in representative environments, and promote collaboration between researchers. It requires robots to demonstrate their capabilities in mobility, sensory perception, planning, mapping, and practical operator interfaces, while searching for simulated victims in unstructured environments.
VIEW MORE
RoboCup@Home
The RoboCup@Home league aims to develop service and assistive robot technology with high relevance for future personal domestic applications. It is the largest international annual competition for autonomous service robots and is part of the RoboCup initiative. A set of benchmark tests is used to evaluate the robots’ abilities and performance in a realistic non-standardized home environment setting. Focus lies on the following domains but is not limited to: Human-Robot-Interaction and Cooperation, Navigation and Mapping in dynamic environments, Computer Vision and Object Recognition under natural light conditions, Object Manipulation, Adaptive Behaviors, Behavior Integration, Ambient Intelligence, Standardization and System Integration. It is colocated with the RoboCup symposium.
VIEW MORE
CoSpace Challenge
The RCAP CoSpace Challenge consists of two sub-leagues: CoSpace Rescue Challenge and CoSpace Autonomous Delivery (ADL) Challenge. In the Rescue Challenge, teams develop strategies for both real and virtual autonomous robots to navigate, search, and collect objects in a shared CoSpace environment, competing head-to-head with another team. This challenge emphasizes path planning and search algorithms. In the ADL Challenge, teams combine mobile robotics with supply chain management by programming robots to perform fast and autonomous parcel deliveries in last-mile and smart city scenarios.